一、引言
车载雷达系统,特别是用于精密探测、遥感测绘、军事侦察等领域的高性能雷达,其工作性能与精度在很大程度上取决于雷达天线的姿态。天线基座的水平度是影响波束指向准确性和数据质量的关键因素。在复杂多变的野外地形或机动部署场景下,车辆平台难以始终保持理想水平。因此,一套高效、可靠、自动化的调平系统至关重要。机电式自动调平系统,以其结构相对简单、响应速度快、控制精度高、环境适应性强等优点,成为车载雷达平台的主流解决方案。
二、系统总体方案设计
本方案旨在设计一套基于机电控制技术的车载雷达平台全自动调平系统。其核心目标是:在车辆驻停后,系统能自动、快速、高精度地将雷达载车平台调整至水平状态(通常要求水平误差在若干角分以内),并在后续工作中保持该状态,或在受外力干扰产生微小倾斜时进行动态补偿。
系统组成架构:
- 水平传感单元: 作为系统的“眼睛”,负责实时监测平台的水平姿态。通常采用高精度双轴倾角传感器(如电解液式、MEMS式),测量平台绕X轴(横滚)和Y轴(俯仰)的倾斜角度,并将模拟或数字信号传输给控制核心。
- 控制核心单元: 作为系统的“大脑”,通常由微控制器(MCU)或可编程逻辑控制器(PLC)构成。它接收传感器的实时数据,运行调平控制算法(如PID控制),计算出各支撑腿所需的调整量和方向,并生成相应的控制指令,驱动执行机构动作。
- 机电执行机构: 作为系统的“手脚”,负责执行具体的调平动作。本方案采用机电式支腿,通常由以下部件构成:
- 驱动电机: 采用直流伺服电机或步进电机,提供旋转动力。
- 减速与传动机构: 将电机的高速旋转转换为低速、大扭矩的输出,并可能将旋转运动转换为直线运动。常用蜗轮蜗杆减速器或行星齿轮减速器,兼具减速和自锁功能,确保调平后支腿位置锁定。
- 机械支腿: 通常为丝杠螺母机构,将传动机构的旋转运动转化为支腿的直线伸缩运动,直接顶升或下降车体相应角落。
- 人机交互与电源单元:
- 操作面板/显示器: 提供系统状态(如水平角度、支腿行程、故障代码)显示,以及手动/自动模式切换、启动、急停等操作接口。
- 动力电源与驱动电路: 为整个系统(特别是驱动电机)提供稳定可靠的电力供应,包括电机驱动模块(如H桥驱动器)。
三、机电控制系统核心设计
- 控制策略与算法:
- 调平逻辑: 系统上电自检后,操作员启动自动调平流程。控制器读取传感器初始倾角,判断倾斜方向与幅度。采用“追高法”或“四点协调法”等策略,优先调整倾斜角度最大的方向,或协调控制四个支腿按预定顺序和速度动作,避免车体结构承受过大扭力。
- 控制算法: 采用经典的PID(比例-积分-微分)控制算法。控制器根据目标水平值(零位)与传感器反馈的实际值之间的偏差(e),计算出对电机的控制量(如PWM占空比)。PID参数(Kp, Ki, Kd)需根据具体机械系统进行整定,以实现快速响应、超调量小、最终静态精度高的效果。
- 安全与容错机制: 算法中需集成支腿极限位置保护(限位开关)、电机过流保护、调平超时保护、传感器失效检测等,确保系统安全。
- 关键机电部件选型与设计:
- 倾角传感器: 选择测量范围、分辨率(通常需达到0.001°)、响应频率和环境适应性满足要求的型号。
- 电机与驱动器: 根据支腿的最大负载(车重与设备重量分配)、所需伸缩速度、系统电压等计算所需电机的扭矩和功率,选用带编码器反馈的电机可实现更精确的位置闭环控制。驱动器需能提供足够的输出电流并具备良好的散热和保护功能。
- 机械传动设计: 蜗轮蜗杆机构因其大减速比和反向自锁特性而被广泛采用,能确保电机断电后支腿位置保持不变。丝杠需有足够的刚度和行程,并考虑防尘密封。
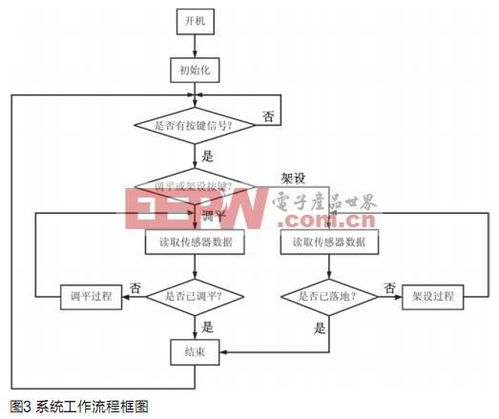
- 系统工作流程:
- 部署与启动: 车辆驶入预定阵地,制动驻停。操作员通过面板启动自动调平系统。
- 状态检测: 控制系统进行自检(传感器、支腿限位、电路通讯)。
- 粗调平: 控制器根据初始倾角,快速驱动四个支腿伸出接触地面直至承重(可能通过压力传感器或电机电流突变判断),将平台初步抬离车桥,消除轮胎悬架的影响。
- 精调平: 进入高精度PID调节阶段。控制器持续比较实时倾角与目标值,微调各支腿伸缩量,逐步减小水平误差,直至进入预设的精度容差范围内(如±0.05°)。
- 锁定与完成: 达到水平后,控制器停止电机,依靠传动机构的自锁特性保持位置。面板显示“调平完成”,系统进入监测状态。在工作过程中,系统可设定为持续监测模式,若因地面沉降或外力导致水平度超差,可自动启动微调。
- 撤收: 任务结束后,控制所有支腿同步收缩回位,车辆恢复机动状态。
四、方案优势与关键技术点
- 优势:
- 自动化程度高: 全过程无需人工干预,调平速度快,效率高。
- 精度高、稳定性好: 闭环控制结合高精度传感器,能达到很高的调平精度;机械自锁保证长期稳定性。
- 环境适应性强: 机电系统对电磁环境相对不敏感,可靠性高,适于野外恶劣环境。
- 承载能力强: 机械结构坚固,可支撑重型雷达设备。
- 关键技术点:
- 多支腿协调控制算法: 避免“虚腿”和结构应力集中。
- 系统建模与PID参数整定: 实现动态性能最优化。
- 机电接口可靠性设计: 包括机械防抖动、电气抗干扰、连接件防松等。
- 轻量化与集成化设计: 在保证强度前提下减轻支腿系统重量,便于车载。
五、结论
本方案提出的车载雷达机电式自动调平系统,通过高精度倾角传感器、智能控制单元和高效机电执行机构的有机结合,形成了一个完整的闭环控制系统。它能够有效克服地形不平带来的影响,为车载雷达提供一个稳定、精确的水平工作基座,从而保障雷达系统性能的充分发挥。该系统方案具有较高的可靠性、实用性和推广价值,可广泛应用于各类需要快速精密调平的车载设备平台。